10. STM32. Програмування STM32F103. TIMER. Захоплення сигналу
Однією з типових задач для мікроконтролера є обробка вхідних сигналів. У STM32 з цією задачею досить вправно справляються таймери загального призначення. Але, перш ніж перейти до розглядання теми захоплення сигналу таймером, спочатку розглянемо ще один приклад, який є продовженням попередньої статті.
Робота з сонаром HC-SR04
У роботі з сонаром HC-SR04 використовується зовнішнє переривання. Докладніше із зовнішніми перериваннями познайомимося трохи пізніше. У цьому прикладі мікроконтролер посилає сонару імпульс (Trigger), який запускає вимірювання. Через деякий час сонар має "підняти" сигнал Echo - саме у цей момент починається відлік часу. А потім сонар сигнал Echo "опускає". У цей момент вимірювання закінчується. З таймера зчитуються показник лічильника і, в залежності від виміряної довжини зворотного імпульсу Echo, вираховується відстань від сонара до перешкоди. Фактично, ми вимірюємо час між двома подіями. Ми це вже робили у попередній статті.Діаграма сигналів HC-SR04:
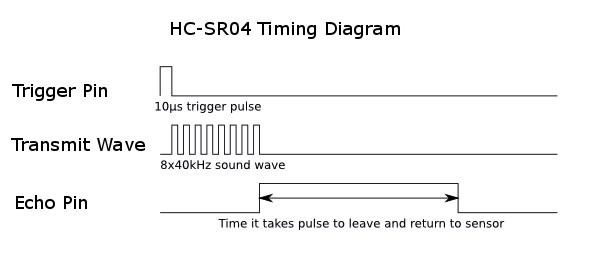
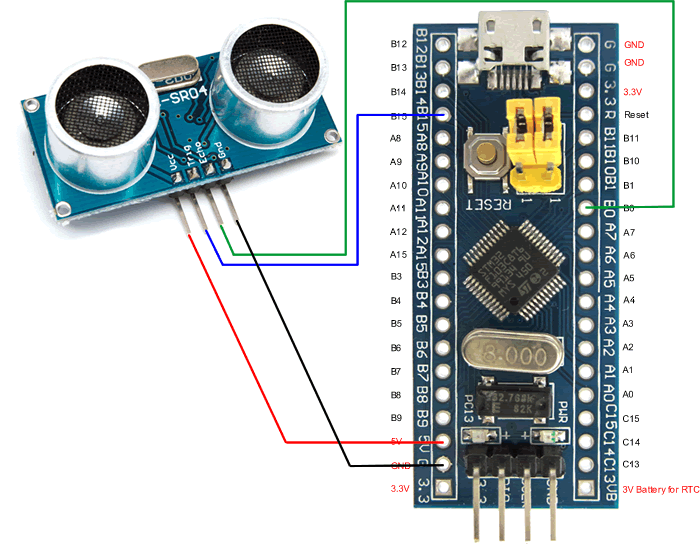
Схема підключення сонара до тестової плати STM32F103C8:
Текст програми для роботи з сонаром HC-SR04 можете скачати на сторінці з прикладами.
Я не даремно навів цей приклад, бо далі піде мова про захоплення сигналу таймером. Отже, вимірювання довжини імпульсу на вході мікроконтролера - це типова задача і таймери можуть вимірювати їх у більш простий спосіб, до того ж значно точніше і без використання зовнішніх переривань.
Захоплення сигналу
На ноги контролера виведено канали таймерів (Дивись TIMn_CH# ). Де, n - номер таймера # - номер каналу. Наприклад, TIM2_CH1 - перший канал таймеру TIM2.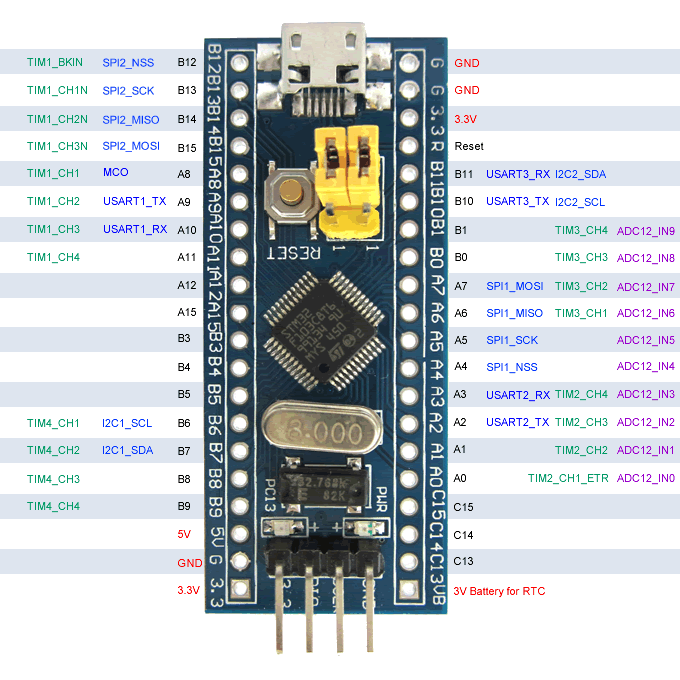
Канали таймерів можуть працювати як входи (для роботи з вхідними сигналами), і як виходи, коли таймери генерують вихідні сигнали.
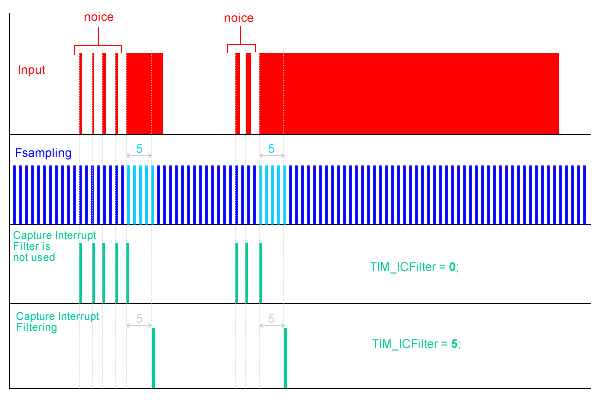
Ідея захоплення сигналу полягає у тому, що при зміні стану вхідного сигналу таймер зберігає у спеціальний регістр поточне значення лічильника і викликає переривання. Але це ще не все. Можна налаштувати дільник, щоб таймер реагував на кожний n-ний імпульс. Також можна налаштувати фільтр. Фільтр використовується коли сигнал зашумлений. Фільтр працює як зворотній лічильник. Тобто, коли на вході сигнал змінив стан, таймер віднімає від числа зазначеного у фільтрі одиницю і чекає наступної вибірки. Перевірка сигналу повторюється, доки лічильник не дорахує до нуля, і, якщо після цього сигнал залишився не змінним, тоді викликається переривання. Для наочності наведу діаграму. У ній сигнал має шуми і нам треба відфільтрувати ці шуми. На діаграмі зображена робота таймера без фільтра і з фільтром = 5.
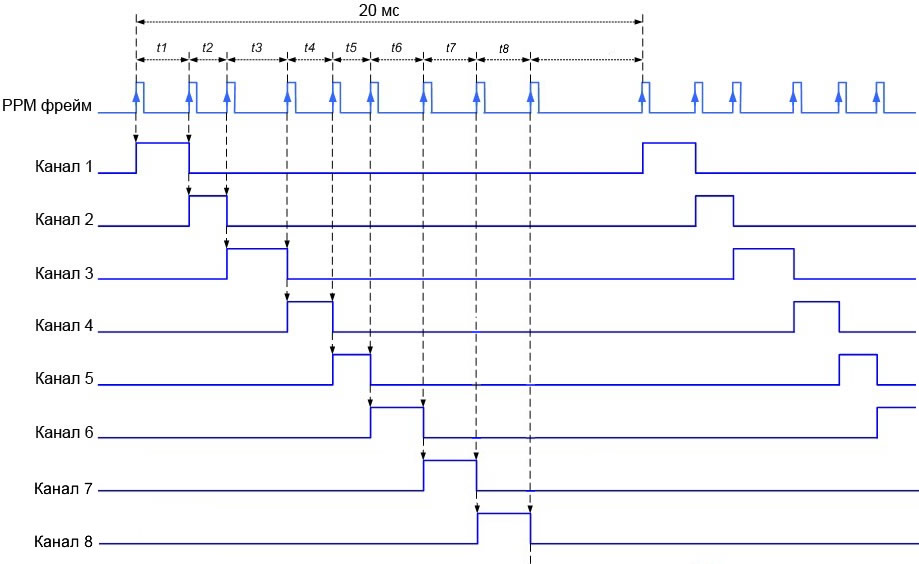
Давайте розглянемо приклад розбору PPM сигналу. Якщо Ви не знаєте що таке PPM, це не біда. Це досить специфічна річ. Важливо зрозуміти, що PPM - періодичний сигнал з 8-ми посилок різної довжини. І нам треба виміряти час між кожним з 8-ми імпульсів. Після 8-ми імпульсів іде пауза. По ній ми будемо знати, що посилка з 8-ми імпульсів скінчилась. За нею іде наступна посилка. PPM сигнал виглядає так:
Я наведу код програми, а нижче - пояснення:
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
void SetSysClockTo72(void)
{
ErrorStatus HSEStartUpStatus;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration -----------------------------*/
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig( RCC_HSE_ON);
/* Wait till HSE is ready */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if (HSEStartUpStatus == SUCCESS)
{
/* Enable Prefetch Buffer */
//FLASH_PrefetchBufferCmd( FLASH_PrefetchBuffer_Enable);
/* Flash 2 wait state */
//FLASH_SetLatency( FLASH_Latency_2);
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config( RCC_HCLK_Div2);
/* PLLCLK = 8MHz * 9 = 72 MHz */
RCC_PLLConfig(0x00010000, RCC_PLLMul_9);
/* Enable PLL */
RCC_PLLCmd( ENABLE);
/* Wait till PLL is ready */
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source */
RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK);
/* Wait till PLL is used as system clock source */
while (RCC_GetSYSCLKSource() != 0x08)
{
}
}
else
{ /* If HSE fails to start-up, the application will have wrong clock configuration.
User can add here some code to deal with this error */
/* Go to infinite loop */
while (1)
{
}
}
}
volatile uint16_t PPMBuffer[] = {0x0000, 0x0000, 0x0000, 0x0000, 0x0000, 0x0000, 0x0000, 0x0000};
volatile uint8_t PPMi = 0;
volatile uint16_t PPMValue_Prev, PPMValue;
void ppm_init() {
GPIO_InitTypeDef gpio_cfg;
GPIO_StructInit(&gpio_cfg);
/* Timer TIM2, channel 1 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//gpio_cfg.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_cfg.GPIO_Mode = GPIO_Mode_IPU;
gpio_cfg.GPIO_Pin = GPIO_Pin_1;
GPIO_Init(GPIOA, &gpio_cfg);
/* Timer TIM2 enable clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Timer TIM2 settings */
TIM_TimeBaseInitTypeDef timer_base;
TIM_TimeBaseStructInit(&timer_base);
timer_base.TIM_Prescaler = 72;
TIM_TimeBaseInit(TIM2, &timer_base);
/* Signal capture settings:
- Channel: 1
- Count: Up
- Source: Input
- Divider: Disable
- Filter: Disable */
TIM_ICInitTypeDef timer_ic;
timer_ic.TIM_Channel = TIM_Channel_2;
//timer_ic.TIM_ICPolarity = TIM_ICPolarity_BothEdge; # !!! BothEdge not supported
timer_ic.TIM_ICPolarity = TIM_ICPolarity_Rising;
timer_ic.TIM_ICSelection = TIM_ICSelection_DirectTI;
timer_ic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timer_ic.TIM_ICFilter = 0;
TIM_ICInit(TIM2, &timer_ic);
/* Enable Interrupt by overflow */
TIM_ITConfig(TIM2, TIM_IT_CC2, ENABLE);
/* Timer TIM2 Enable */
TIM_Cmd(TIM2, ENABLE);
/* Enable Interrupt of Timer TIM2 */
NVIC_EnableIRQ(TIM2_IRQn);
}
void TIM2_IRQHandler(void){
volatile uint16_t PPM;
if (TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
/* Reset flag */
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
PPMValue_Prev = PPMValue;
PPMValue = TIM_GetCapture2(TIM2);
PPM = (PPMValue >= PPMValue_Prev) ? (PPMValue - PPMValue_Prev) : (UINT16_MAX - PPMValue_Prev + PPMValue);
if (PPM < 3000) { // Pause
PPMBuffer[PPMi] = PPM;
PPMi++;
if (PPMi > 7) {
PPMi = 0;
}
}
else {
PPMi = 0;
}
/* over-capture */
if (TIM_GetFlagStatus(TIM2, TIM_FLAG_CC2OF) != RESET)
{
TIM_ClearFlag(TIM2, TIM_FLAG_CC2OF);
// ...
}
}
}
int main(void)
{
SetSysClockTo72();
ppm_init();
while(1)
{
// You can read PPM data from array PPMBuffer
// For example: PPMBuffer[n]; n - number of channel 0..7
}
}
Роздивимось процедуру ініціалізації таймера TIM2. Спочатку іде стандартна ініціалізація таймера за допомогою структури TIM_TimeBaseInitTypeDef. Нам важливо знати, з якою частотою буде "цокати" таймер, тому обов`язково звертаємо увагу на частоту тактуваня і поділювач (TIM_Prescaler):
/* Timer TIM2 enable clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Timer TIM2 settings */
TIM_TimeBaseInitTypeDef timer_base;
TIM_TimeBaseStructInit(&timer_base);
timer_base.TIM_Prescaler = 72;
TIM_TimeBaseInit(TIM2, &timer_base);
А вже потім налаштовуємо захоплення сигналу. Для цього використовується структура TIM_ICInitTypeDef. Вона має наступні параметри:
- TIM_Channel - Номер каналу
- TIM_ICPolarity - Визначає активний фронт вхідного сигналу. Тут невеличка засада. TIM_ICPolarity_BothEdge, тобто по наростаючому і спадаючому фронту у STM32F103C8 не спрацює. Або по на наростаючому або по спадаючому фронту. У даному випадку нас цілком влаштовує по фронту. На початку статті я не даремно навів приклад з зовнішніми перериваннями. Саме тому, що таймер саме нашого контролера можна налаштувати на захват або лише фронту або лише спаду, довелося шукати вихід, використовуючи зовнішні переривання.
- TIM_ICSelection - Визначає вхід
- TIM_ICPrescaler - Поділювач вхідного сигналу
- TIM_ICFilter - Фільтр (0x0 ... 0xF)
/* Signal capture settings:
- Channel: 1
- Count: Up
- Source: Input
- Divider: Disable
- Filter: Disable */
TIM_ICInitTypeDef timer_ic;
timer_ic.TIM_Channel = TIM_Channel_2;
//timer_ic.TIM_ICPolarity = TIM_ICPolarity_BothEdge; # !!! BothEdge not supported
timer_ic.TIM_ICPolarity = TIM_ICPolarity_Rising;
timer_ic.TIM_ICSelection = TIM_ICSelection_DirectTI;
timer_ic.TIM_ICPrescaler = TIM_ICPSC_DIV1;
timer_ic.TIM_ICFilter = 0;
TIM_ICInit(TIM2, &timer_ic);
Вмикаємо переривання:
/* Enable Interrupt by overflow */
TIM_ITConfig(TIM2, TIM_IT_CC2, ENABLE);
/* Timer TIM2 Enable */
TIM_Cmd(TIM2, ENABLE);
/* Enable Interrupt of Timer TIM2 */
NVIC_EnableIRQ(TIM2_IRQn);
Що забули?. Звісно! Треба налаштувати ногу, на яку заведений другий канал другого таймера, на вхід:
/* Timer TIM2, channel 1 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//gpio_cfg.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_cfg.GPIO_Mode = GPIO_Mode_IPU;
gpio_cfg.GPIO_Pin = GPIO_Pin_1;
GPIO_Init(GPIOA, &gpio_cfg);
Тепер, при надходженні фронту сигналу, таймер буде зберігати показник лічильника у спеціальний регістр і викликати переривання TIM2_IRQHandler, де буде вираховуватись час між імпульсами і зберігатися дані у масив PPMBuffer:
void TIM2_IRQHandler(void){
volatile uint16_t PPM;
if (TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
/* Reset flag */
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
PPMValue_Prev = PPMValue;
PPMValue = TIM_GetCapture2(TIM2);
PPM = (PPMValue >= PPMValue_Prev) ? (PPMValue - PPMValue_Prev) : (UINT16_MAX - PPMValue_Prev + PPMValue);
if (PPM < 3000) { // it was before 10000
PPMBuffer[PPMi] = PPM;
PPMi++;
if (PPMi > 7) {
PPMi = 0;
}
}
else {
PPMi = 0;
}
/* over-capture */
if (TIM_GetFlagStatus(TIM2, TIM_FLAG_CC2OF) != RESET)
{
TIM_ClearFlag(TIM2, TIM_FLAG_CC2OF);
// ...
}
}
}
І, поки ми будемо розбирати та вираховувати наші дані, таймер буде крокувати далі. Навіть, якщо наш контролер був зайнятий і обробив переривання з затримкою, за час якої таймер вже "пішов далі", це не біда. Показник лічильника було відкладено до регістра і він очікує на обробку. Зчитується регістр функцією TIM_GetCapture2(). На відміну від наведеного на початку статті прикладу зі зовнішнім перериванням, цей метод є більш точним, бо на виклик переривання та зчитування показань таймера теж витрачається час. Інколи це буває досить критично. До того ж, не завжди обробка переривань може бути виконана негайно.
У випадку з сонаром використання захоплення сигналу може і не принести помітного ефекту, але при розборі PPM сигналу результати стали помітно менш зашумлені.
Бажаю успіхів!
Дивись також:
- 1. STM32. Програмування STM32F103. Тестова плата. Прошивка через UART та через ST-Link
- 2. STM32. Програмування. IDE для STM32
- 3. STM32. Програмування STM32F103. GPIO
- 4. STM32. Програмування STM32F103. Тактування
- 5. STM32. Програмування STM32F103. USART
- 6. STM32. Програмування STM32F103. NVIC
- 7. STM32. Програмування STM32F103. ADC
- 8. STM32. Програмування STM32F103. DMA
- 9. STM32. Програмування STM32F103. TIMER
- 10. STM32. Програмування STM32F103. TIMER. Захоплення сигналу
- 11. STM32. Програмування STM32F103. TIMER. Encoder
- 12. STM32. Програмування STM32F103. TIMER. PWM
- 13. STM32. Програмування STM32F103. EXTI
- 14. STM32. Програмування STM32F103. RTC
- 15. STM32. Програмування STM32F103. BKP
- 16. STM32. Програмування STM32F103. Flash
- 17. STM32. Програмування STM32F103. Watchdog
- 18. STM32. Програмування STM32F103. Remap
- 19. STM32. Програмування STM32F103. I2C Master
- 20. STM32. Програмування STM32F103. I2C Slave
- 21. STM32. Програмування STM32F103. USB
- 22. STM32. Програмування STM32F103. PWR
- 23. STM32. Програмування STM32F103. Option bytes
- 24. STM32. Програмування STM32F103. Bootloader
- STM32. Скачати приклади
- System Workbench for STM32 Інсталяція на Ubuntu
- Keil uVision5 – IDE для STM32
- IAR Workbench – IDE для STM32
- Керування безколекторним двигуном постійного струму (BLDC) за допомогою STM32
- Керування PMSM за допомогою STM32
Tags
barometer flash exti esp8266 bmp280 uart meteo bluetooth motor programmator remap examples sms i2c 3d-printer avr lcd piezo pwm nvic rs-232 mpu-9250 encoder mongodb timer mpu-6050 watchdog usart max1674 brushless python solar ethernet eb-500 mpx4115a atmega sensors git dht11 rfid displays css flask eeprom raspberry-pi wifi rtc books led ssd1306 options capture soldering bldc html websocket nodemcu tim docker bkp dma web java-script smd hih-4000 adc gpio ssd1331 bme280 st-link ngnix foc battery pmsm usb servo dc-dc stm32 gps
Архіви