STM32 - сторінка 3
‹ 1 2
12. STM32. Програмування STM32F103. TIMER. PWM

У попередніх статтях ми познайомились з тим, як таймери можуть захоплювати вхідний сигнал. Таймери мікроконтролера STM32 також можуть формувати вихідні сигнали. Сьогодні ми познайомимося з PWM або ШІМ сигналом на прикладах.
Ініціалізація PWM виконується наступним чином:
- налаштовується вихід порту відповідного каналу таймера, який буде задіяний для формування PWM сигналу
- виконуються базові налаштування таймера
- виконується налаштування OC каналу таймера (налаштування параметрів PWM)
- вмикається таймер
10. STM32. Програмування STM32F103. TIMER. Захоплення сигналу
Однією з типових задач для мікроконтролера є обробка вхідних сигналів. У STM32 з цією задачею досить вправно справляються таймери загального призначення. Але, перш ніж перейти до розглядання теми захоплення сигналу таймером, спочатку розглянемо ще один приклад, який є продовженням попередньої статті.
9. STM32. Програмування STM32F103. TIMER
Таймери загального призначення
Таймери у мікроконтролерах STM32 поділяються за функціоналом на:- basic timers (базові таймери)
- general-purpose timers (загального призначення: TIM2, TIM3, TIM4)
- advanced-control timers (продвинуті таймери: TIM1)
8. STM32. Програмування STM32F103. DMA
DMA (Direct Memory Access) контролер прямого доступу до пам`яті. Його головна задача: передача даних на апаратному рівні між пам’ятю і периферією без участі процесора. Мається на увазі, що при цьому наша програма може виконувати інші операції, не відволікаючись на передачу даних. В попередній статті ми задіяли DMA для роботи з АЦП. І це було круто. Тепер розглянемо роботу DMA докладніше і ще раз впевнимось у потужній користі DMA на прикладі ще однієї типової задачі: відправки даних через USART.
Ми вже використовували USART. Відправка даних через USART - досить тривалий процес, під час якого (у попередніх прикладах) процесор чекає, поки буде відправлений весь буфер. Дивись функцію USARTSend. Поки ця функція не закінчить відправку всього буфера, далі обробка у головному циклі програми не йде. Усі чекають. У нас були досить прості приклади і нам було байдуже. Але, рано чи пізно, нам знадобиться вся потужність контролера і треба буде оптимізувати цю операцію. Один з методів - використання DMA. Ми підготовимо дані на відправку, дамо завдання DMA, він буде собі відправляти байт за байтом, а процесор займеться чимось більш важливим.
7. STM32. Програмування STM32F103. ADC
ADC (Analog-to-Dogital Converter) - Аналого-цифровий перетворювач (далі АЦП). АЦП конвертує аналоговий сигнал у цифровий код. Такий собі вольтметр, який ми сьогодні заставимо працювати у декількох режимах, у тому числі із застосуванням DMA. Мікроконтролери можуть мати декілька АЦП. Конкретно STM32F103C8 має 2 АЦП. АЦП може обробляти декілька каналів (до 18). Канал - це зовнішній сигнал, який може бути заведений на одну з ніг мікроконтроллера, або внутрішній канал, наприклад вбудований термометр. Аналоговий сигнал можна подавати на ноги, які мають маркування ADC12_INn. Де n - номер каналу. Наприклад, ADC12_IN1.
6. STM32. Програмування STM32F103. NVIC
NVIC (Nested vectored interrupt controller) - модуль контролю переривань. Він виконує наступні функції:
- дозволяє/забороняє переривання
- назначає пріоритет переривань (від 0 до 15. 0 - максимальній пріоритет, 15 - мінімальний пріоритет)
- автоматично зберігає дані при виконанні одиноких чи вкладених переривань.
5. STM32. Програмування STM32F103. USART
Ми вже використовували послідовний порт для програмування мікроконтролера. Тепер застосуємо його за прямим призначенням. STM32F103 Має 3 послідовних USART порти. Ми розглянемо приклад з USART1. Решта портів працюють аналогічно. У цьому прикладі ми підключимо мікроконтролер до комп`ютера за допомогою UART-USB перехідника. Та будемо використовувати термінальну програму для передачі команд мікроконтролеру.
4. STM32. Програмування STM32F103. Тактування
Тактування - це серце мікроконтролера. Для роботи мікроконтролера серце має битися. Чим вища частота, тим швидше працює мікроконтролер, але і більше споживає енергії. І навпаки, чим менша частота тактування, тим менше споживання енергії та менша швидкість роботи контролера. Те саме стосується периферії. Тактування слід налаштовувати в залежності від поточних задач. У попередніх прикладах ми не займали налаштування тактування і мікроконтролер працював з невідомою нам частотою. Але у подальшому, при роботі з периферією нам прийдеться налаштовувати сам мікроконтролер і певні модулі на роботу на конкретній частоті. Тому ми маємо розібратися з цим питанням.
3. STM32. Програмування STM32F103. GPIO
У попередній статті ми використовували простеньку програму, яка блимає світлодіодом. Трохи модифікуємо її і спробуємо розібратися, як налаштувати виводи мікроконтролера для роботи на вхід і вихід. C13 налаштуємо як вихід. До нього підключений світлодіод на тестовій платі. B0 налаштуємо на вхід і підключимо до нього кнопку. У натиснутому положенні кнопка має замикати ногу B0 на землю.
2. STM32. Програмування. IDE для STM32
Для того, щоб розробляти свої програми нам знадобиться середовище розробки, бажано з дебагером, і компілятор C.
Я зупинився на CooCox CoIDE та GCC. По-перше цей софт не коштує грошей, по-друге - з ним не виникло ніяких питань. Встановив і почав робити. Щоправда CooCox зроблений тільки під Windows. Це не зовсім добре. І хоча на Ubuntu CooCox і працює під wine і навіть компіляція проходить вдало, з дебагером проблема. Та й робота через wine - це не true way. Якось я напишу, як налаштувати IDE для STM32 під Ubuntu.
А тим часом...
1. STM32. Програмування STM32F103. Тестова плата. Прошивка через послідовний порт та через ST-Link програматор
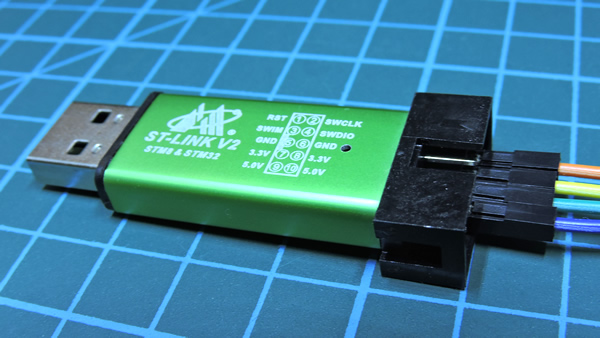
Мікроконтролери STM32 здобувають все більшу популярність завдяки своїй потужності, досить різнорідної периферії, та своєї гнучкості. Ми почнемо вивчати STM32F103C8T6, використовуючи бюджетну тестову плату, вартість якої не перевищує 2$ (у китайців). Ще нам знадобиться ST-Link програматор, вартість якого близько 2.5$ (у китайців). Такі суми витрат доступні і студентам і школярам, тому саме з такого бюджетного варіанту я і пропоную почати.
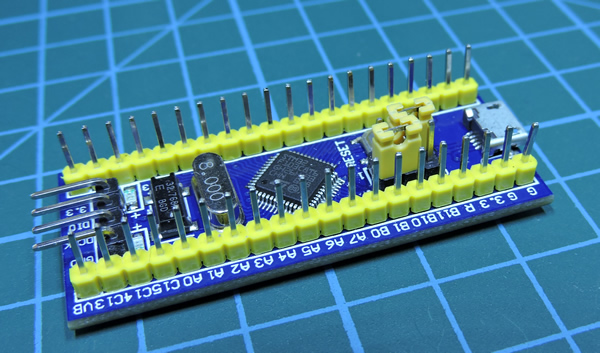
Цей мікроконтролер не є найпотужнішим серед STM32, але і не самий слабкий. Такий собі середнячок. Існують різні тестові плати, у томі числі Discovery які за ціною коштують близько 20$. На таких платах є майже те саме, що і на нашій платі, плюс програматор. В нашому випадку ми будемо використовувати програматор окремо.
‹ 1 2
Tags
barometer flash exti esp8266 bmp280 uart meteo bluetooth motor programmator remap examples sms i2c 3d-printer avr lcd piezo pwm nvic rs-232 mpu-9250 encoder mongodb timer mpu-6050 watchdog usart max1674 brushless python solar ethernet eb-500 mpx4115a atmega sensors git dht11 rfid displays css flask eeprom raspberry-pi wifi rtc books led ssd1306 options capture soldering bldc html websocket nodemcu tim docker bkp dma web java-script smd hih-4000 adc gpio ssd1331 bme280 st-link ngnix foc battery pmsm usb servo dc-dc stm32 gps
Архіви